Cylindrical Coordinates
In Cylindrical Coordinates type of robot, there is a rotary motion at the base followed through the two linear motions. The axes for the cylindrical coordinates are θ, the base rotational axis; R (reach) the in-and-out axis; and Z, the up-and down axis. The work area is the space among two concentric cylinders of similar height. The inner cylinder depicts the reach of the arm with the arm completely retracted, and the outer cylinder depicts the reach of the arm along with the arm fully extended. Figure 18 depicts the typical cylindrical robot. Positioning accuracy of this kind of robots is about ± 0.13 mm.
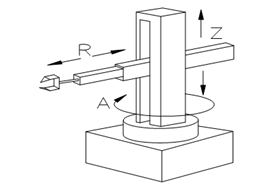
Figure 18: Typical Motions of a Cylindrical Robot