Velocity in a Moving Frame of Reference:
Assume a body performing plane motion as illustrated in Figure. This body can be a vehicle. OX and OY axes are the fixed axes. If I and J are unit vectors along them respectively, then we may say
dI / dt = 0, dJ/ dt = 0
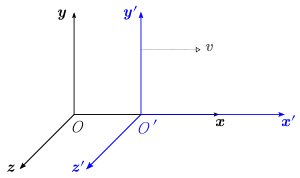
Let any particle P (say, presently at B) that is moving in the vehicle itself. Furthermore, let us consider any one point A as pole in the body. Then motion of P may be studied by fixing axes Ax and Ay to the vehicle at A, i and j are unit vectors working along Ax and Ay respectively. These axes also rotate along the vehicle and therefore we can say di/ dt and dj / dt exist. Also ω and α are the absolute angular velocity & acceleration of the body.
If

Then
Or
rB = rA + rA B
These vectors also may be expressed with reference to fixed set of axes, as below,
rB = X B I + YB J
rA = X A I + YA J
and
rA B = X P i¯ + YP j¯
∴ d rB /dt = d / dt ( XB I¯ + YB J¯)
= d/ dt (X A I + YA J ) + d/dt ( X B i + YB j)
= d X A/dt I + d YA / dt J + X B di/dt + YB dj/ dt + i d X B/ dt + j d YB/ dt
but
di/ dt = ω × i dt and dj / dt = ω × j

∴ drB/ dt = drA/dt + ω × ( xB i + yBj) + i d xB /dt+ j d yB / dt
∴ vB = v A + v AB + vBr