Proportional Plus Reset Plus Rate Controller Actions:
While an error is introduced to a PID controller, the controller's response is a combination of the proportional, integral, and derivative actions, as displays in Figure.
Suppose the error is because of a slowly increasing measured variable. As the error rise, the proportional action of the PID controller generates an outcome which is proportional to the error signal. A reset action of the controller generates an output whose rate of change is determined through the magnitude of the error. In that case, as the error continues to rise at a steady rate and the reset outcome continues to increase its rate of change. The rate action of the controller generates an output whose magnitude is determined through the rate of change. While combined, these actions produce an output as displays in below figure.
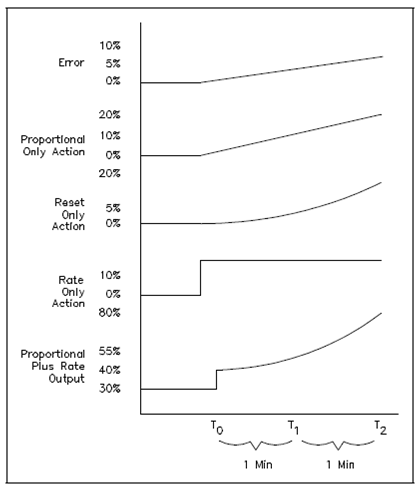
Figure: PID Control Action Responses
As you could see from the combined action curve, the output generates responds instantly to the error along with a signal which is proportional to the magnitude of the error and which will continue to rise as long as the error remains increasing.