Velocity of Points in a Rigid Body:
We consider the equation of pole A in the body as
rA (t ) = x A (t ) i¯ + y A (t ) j¯
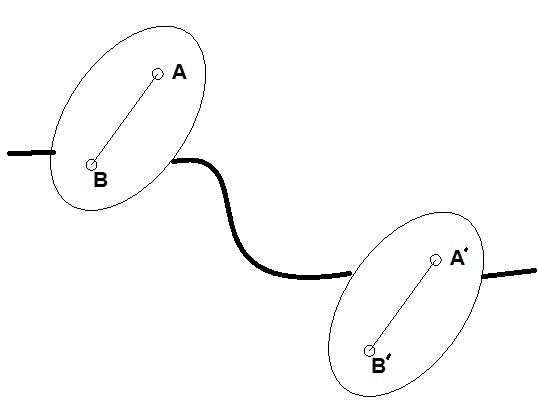
At any instant position vector of any other point B is provided by :
rB = rA + rAB
 is a vector of constant magnitude because distance AB is constant. But
is a vector of constant magnitude because distance AB is constant. But
the direction of this vector can change with respect to time so that d rAB/ d t does exist.
Then by differentiating, we obtain
vB = d rB/dt = d rA/ dt + d rAB /dt
= v A + d rAB/ d t
d rAB / d t is the differentiation of a vector of constant magnitude but altering in direction. If ω is the angular velocity with which the body rotates about the axis, then we may write
d rAB /dt = ω rAB
This is a vector v AB of magnitude ω. rAB , acting at right angles to AB.
Then v B = v A + v AB
Here, in this equation, we should note that velocity of B consists of two components.
(a) The component v A which represents the velocity of translation of pole A.
(b) The component v AB of magnitude ω rAB is caused by the rotation of point B about an axis passing through A, perpendicular to the plane XOY. This component shall be perpendicular to AB.
v B = v A + ω × rAB