Grashofs Criterion:
The possibility of getting several mechanisms for 4R-kinematic chain may be explored by referring the movability of a four bar linkage from the associated dimensions of links.
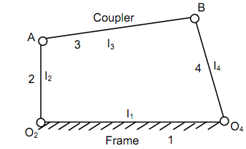
The fixed link is known as 'frame'. The link, that makes complete rotation, is known as crank. The link that has oscillating motion regarding hinge is called rocker or lever.
Assume length of the longest link be 'l'
Length of smallest link be's'
Length of other two links be 'p', 'q'.
There are three possible cases as following
(1) (l + s) < ( p + q)
(2) (l + s) = ( p + q)
(3) (l + s) > ( p + q)
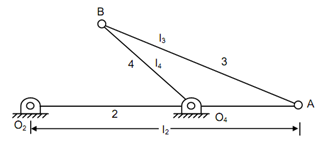
Considering the first case while (l + s) < ( p + q) and supposing l2 > l1. If link 2 contain to make complete rotation, clearly then it ought to be able to achieved the following two extreme positions illustrated in figure whereas A is farthest from O4 and figure while A is nearest to O4. This shall be possible if links 3 and 4 do not prevent these minimum and maximum separations between O4 and A. Therefore, for Δ O4 AB to exist in both of the extreme conditions, the link dimensions must satisfy the following
l1 + l2 < l3 + l4 ,
l4 < l3 + (l2 - l1 )
l3 < l2 + (l4 - l1 )
Thus, while these conditions are met, link 2 shall be capable to act as crank. Likewise link 4 might make complete rotation, if l4 > l1 and obtain the essential conditions by interchanging l2 and l4 in the above equations. In this case, four bar kinematic chain will provide double crank mechanism through smallest link like a frame. If one of the two links l2 and l4 is fixed, link 1 will act as crank, link 3 shall oscillate to permit the remaining link to acts as rocker or lever. Then same situation will arise for the case (l + s) = ( p + q) along a difference being that there shall be instances while links become collinear resulting
in dead centers or change points. When (l + s) > ( p + q) , this will result only in a double rocker or double lever mechanism. Thus, for (l + s) ≤ ( p + q)
(1) While smallest link is frame, a double crank mechanism is attained,
(2) While smallest link is crank or follower crank-rocker or rocker-crank mechanism is attained, and
(3) While smallest link is coupler, double rocker or double lever mechanism is attained.