Instantaneous Centre of Rotation:
While a mechanism executes plane motion, a link associating to the planar mechanism corresponds to one of the three following cases as:
(a) Linear motion, like that of a piston in an internal combustion engine,
(b) Rotary motion, like that of a crank rotating regarding a fixed axis, and
(c) Plane motion, as that of connecting rod of an engine.
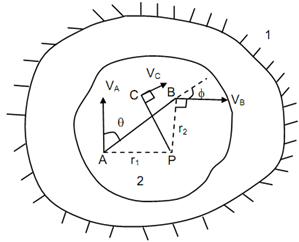
At a particular instant, a link executing general plane motion may be thought of as rotating regarding an imaginary centre. In given figure a rigid body 2 executes plane motion w. r. t. fixed body 1. Assume there is any two obituary points A & B on body 2. The velocities of points A and B are illustrated in the Figure by VA and VB respectively. The perpendiculars to the directions of velocities VA and VB have been drawn at A & B. These perpendiculars meet at point P. Assume AP & BP is r1 and r2 respectively.
The velocity of point A along AB = VA cos θ
The velocity of point B along AB = VB cos φ
Instantaneous Centre of Rotation
As body 2 is rigid, thus, distance AB does not alter. Only this is possible while velocity of B relative to A, that is component along AB, VBA is zero.
Since
VBA = VB cos φ- VA cos θ
Or VB cos φ - VA cos θ = 0
Or VB cos φ = VA cos θ
 . . . (4.1)
. . . (4.1)
From triangle ABP, we have following
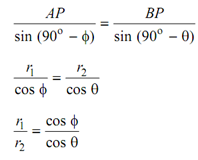 ...........(4.2)
...........(4.2)
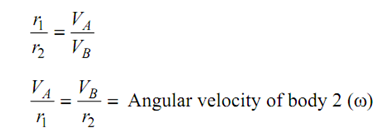
From Equations. (4.1) & (4.2)
 . . (4.2)
. . (4.2)
Thus, the velocities of points A & B are proportional to distance from P and have directions perpendicular to the lines joining respective points to P. therefore, momentarily, the rigid body 2 may be thought of as being in pure rotation around the point P. This point P is known the instantaneous centre of velocity and, in this; its instantaneous velocity is zero. The velocities VA and VB of points A & B are absolute velocities. The instantaneous centre P has been finding out by using these velocities. This instantaneous centre of moving body 2 is in relation to fixed body 1 and so, it has velocity equivalent to zero. So, on the other hand, the instantaneous centre of velocity of body 2 in relation to fixed body 1 may be defined like a point which contains no velocity. This point P may be used to resolve absolute velocity of a point in body 2. The velocity of any point C at this point is given by VC = PC × V B/ r2 and the direction of the VC is perpendicular to the line PC. Like the orientation of body 2 alters, the position of instantaneous centre P also modified.