Example:
The Hermite cubic spline presents a way to describe the coefficients more meaningfully. That is, we need to define a curve by V (0) and V (1), V ′ (0) and V ′ (1), where V (0) and V (1) are the position vectors at the ends of the segment and V ′ (0) and V ′ (1) are the tangent vectors at the endpoints. The geometric significance is that the two endpoints of the Hermite cubic curve are at V (0) and V (1) and the two tangent vectors at the two endpoints are V ′ (0) and V ′ (1). It gives users a way to link two curves and assure a certain degree of continuity. An instance of particular Hermite cubic spline is illustrated in Figure. We next derive the parameter equation, given that V (0), V (1), V ′ (0) and V ′ (1) are known.
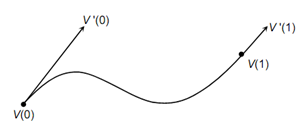
Figure: A Hermite Cubic Spline
Upon differentiation of above Equation of V (t), we have
V ′(t ) = a1 + 2a2 t + 3a3 t 2
Apply boundary conditions to the above Equations
At t = 0; V (0) = a0, V ′ (0) = a1
At t = 1; V (1) = a0 + a1 + a2 + a3 V ′ (1) = a1 + 2a2 + 3a3
On solving these four equations simultaneously for the coefficients, we obtain
a0 = V (0)
a1 = V ′ (0)
a2 = 3 [V (1) - V (0)] - 2V ′ (0) - V ′ (1)
a3 = 2 [V (0) - V (1)] + V ′ (0) + V ′ (1)
Put these coefficients into above equation of V (t) and rearranging gives
V (t ) = V (0) (1 - 3t 2 + 2t3 ) + V (1) (3t 2 - 2t3 ) + V ′(0) (t - 2t 2 + t3 ) + V ′(1) (- t 2 + t 3 )
V ′(t ) = V (0) (- 6t + 6t 2 ) + V (1) (6t - 6t 2 ) + V ′(0) (3t 2 - 4t + 1) + V ′(1) (3t 2 - 2t )
The equation may be represented in matrix form as following:
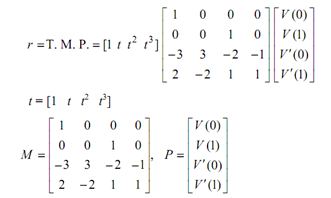
This form can be conveniently adjusted to yield several shapes of curve segment by altering one or more of V (0), V (1), V ′(0) and V ′(1) appropriately. The Hermite form of a cubic spline is found out by defining positions and tangent vectors at the data points. Hermite cubic curves are also called Ferguson's cubic curves. The equation of V (t) is a power basis representation and is good for computation.