Stability of Automatic Control Systems:
All control modes previously elaborates could return a procedure variable to a steady value following a disturbance. This feature is known as "stability."
The Stability is the ability of a control loop to return a controlled variable to a steady, non-cyclic value, subsequent a disturbance.
Control loops could be either stable or unstable. Instability is caused through a combination of procedure time lags discussed before which is capacitance, resistance, and transport time and inherent time lags inside a control system. That concludes in slow response to changes within the controlled variable. As a result, the controlled variable will continuously cycle around the setpoint value.
Oscillations describe these cyclic features. There are three kinds of oscillations which could occur in a control loop. That is constant amplitude, decreasing amplitude, and increasing amplitude. Each and every are display in Figure.
Decreasing amplitude (Figure). These oscillations decrease in amplitude and eventually stop along with a control system which opposes the change in the controlled variable. That is the condition desired in an automatic control system.
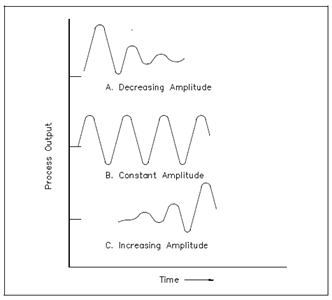
Figure: Types of Oscillations
Constant amplitude (Figure). Action of the controller sustains oscillations of the controlled variable. The controlled variable will never reach a stable condition; thus, this condition is not desired.
Increasing amplitude (Figure). The control system not only sustains oscillations other than also increases them. The control element has reached its full travel limits and causes the procedures to go out of control.