Method of Relative Velocity and Acceleration:
For this reason, a link of a general shape might be considered to begin with. It is illustrated in given fig. Assume there is any arbitrary two points A & B moving with velocities VA & VB. The velocity of B relative to A might be represented by VBA. Assume relative velocity VBA makes an angle θ along line joining A & B. VBA might be resolved into two components VBA cos θ along AB & VBA sin θ perpendicular to AB. As the link is rigid, distance AB remains constant. Thus, component of velocity of B relative to A along AB might not exist. Thus,
VBA cos θ = 0 or cos θ = 0
Or θ= π/2
It means a rigid link contain rotation relative to point A, plus translation along velocity of A.
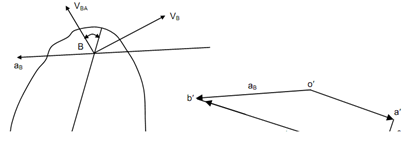
Thus, the direction of VBA is perpendicular to the line joining A & B. If VA is known in magnitude & direction and for VB just direction is known, the magnitude may be finding out by drawing a polygon as stated following:
(1) First the velocity of A that means VA is plotted through supposing an appropriate scale from an arbitrary chosen point o which represents fixed reference. Consider it be represented by 'oa'.
(2) Now, draw a line by o parallel to the direction of velocity of B, that VB.
(3) After that, draw a line through point 'a' that is parallel to the perpendicular to the line AB that meets the direction of VB at point 'b'.
In this velocity polygon oab, 'ob' represents velocity VB in magnitude & direction. After drawing velocity polygon, we may proceed for finding of magnitude of acceleration of point B. If direction of the acceleration of B is known and acceleration of point A is known in magnitude & direction. The vector equation may be written as:
aB = a A + aBA
As

Here aBA is acceleration of B relative to A; at is tangential component of aBA and is centripetal component of aBA.

This is directed from B to A along AB while at contain direction perpendicular to AB.
contain direction perpendicular to AB.
Acceleration polygon may be drawn as:
(1) In magnitude and direction, plot acceleration of A by supposing suitable scale. aA is represented by o′a′.
(2) Plot centripetal component  by drawing line parallel to AB and shows its magnitude according to the vector equation. is showed by a′a′1.
by drawing line parallel to AB and shows its magnitude according to the vector equation. is showed by a′a′1.
(3) From a1 draw a line perpendicular to aa1′ or parallel to the perpendicular to AB to show direction of .
(4) Draw a line parallel to the direction of acceleration of B that means aB from fixed reference o′ to meet the line signifying direction of . They meet at the point b′. o′b′ signify acceleration of B in direction & magnitude.