Q. What is Polyphase Induction Machine Performance?
Some of the important steady-state performance characteristics of a polyphase induction motor include the variation of current, speed, and losses as the load-torque requirements change, and the starting and maximum torque. Performance calculations can be made from the equivalent circuit. All calculations can be made on a per-phase basis, assuming balanced operation of the machine. Total quantities can be obtained by using an appropriate multiplying factor.
The equivalent circuit of Figure (c), redrawn for convenience in Figure, is usually employed for the analysis. The core losses, most of which occur in the stator, as well as friction, windage, and stray-load losses, are included in the efficiency calculations. The power- flow diagram for an induction motor is given in Figure, in which m1 is the number of stator phases, φ1 is the power factor angle between ¯V1 and ¯I1, φ2 is the power factor angle between ¯E1 and ¯I2, T is the internal electromagnetic torque developed, ωs is the synchronous angular velocity inmechanical radians per second, and ωm is the actualmechanical rotor speed given by ωs (1-S). The total power Pg transferred across the air gap from the stator is the difference between the electric power input Pi and the stator copper loss. Pg is thus the total rotor input power, which is dissipated in the resistance R�2'/S of each phase so that
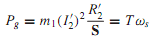
Subtracting the total rotor copper loss, which is m1(I'�2)2 R'2 or SP8, from Equation for Pg, we get the internal mechanical power developed,