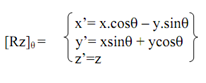
Rotation about z-axis - Transformation for 3-d rotation
Rotation about z-axis is explained by the xy-plane. Suppose a 3-D point P(x,y,z) be rotated to P'(x',y',z') along with angle of rotation q see Figure 9. Because both P and P' lies upon xy-plane so z=0 plane their z components keeps similar as z=z'=0.
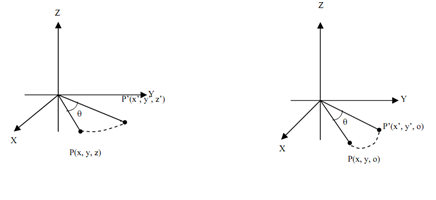
Figure a Figure b
Thus, P'(x'y',0) be the effect of rotation of point P(x,y,0) making a +ive or anticlockwise angle φ with value of z=0 plane, as demonstration in Figure 10. From figure (10),
P(x,y,0) = P(r.cos φ,r.sin θ,0)
P'(x',y',0)=P[r.cos(φ + θ),rsin(φ + θ),0]
The coordinates of P' are as:
x'=r.cos(θ + φ) = r(cos θ cos φ - sin θ sin φ)
=x.cos θ - y.sin θ (where x=rcos φ and y=rsin φ)
As the same;
y'= rsin(θ + φ)=r(sin θ cos φ + cos θ.sin φ)
=xsin θ +ycos θ
Hence,