The arm of a hydraulic robot is controlled as shown in the block diagram below:

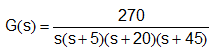
The arm dynamics are represented by:
Dynamic specification for the arm requires:
- Percentage overshoot for a step input < 20%
- Rise time < 1.2 seconds
- Velocity constant, Kv ³ 10
Part 1: Phase Lead Controller Design
1. Design a suitable phase-lead controller. You should explain in detail how your design has been developed. Your solution should include Bode plots constructed both manually and using an appropriate package such as MATLAB or Scilab.
2. Using the design rules in the Control Engineering Data Sheets, obtain the TF of the "equivalent" 2nd order TF (including controller).
3. Compare the unit step responses of the equivalent 2nd order TF and the actual closed loop system, and comment on the accuracy of the equivalent.
Part 2: Digital Controller Implementation
1. Using the phase lead controller transfer function obtained above as a prototype, design a digital controller using the Bilinear Transform or any other method of your choice.
2. Select a suitable sampling increment, T, given the following constraints:
a. the minimum value for T is, T= 1mS
b. the value of T should be as large as possible, but must provide a unit step response that is within a 5% error band around the unit step response obtained from the 'ideal' closed loop system designed in Part 1.
3. Compare the performance of the digital controlled system with the analogue controlled system obtained in Part 1 (this should include consideration of both time domain and frequency domain responses).