Equivalent Circuit of a DC Machine
A review of the material presented with regard to elementary direct-current machines can be helpful at this stage to recall the principles of operation for dc machines. The circuit representations of a dc generator and a dc motor are shown in Figure. Under steady-state conditions the interrelationships between voltage and current are given by

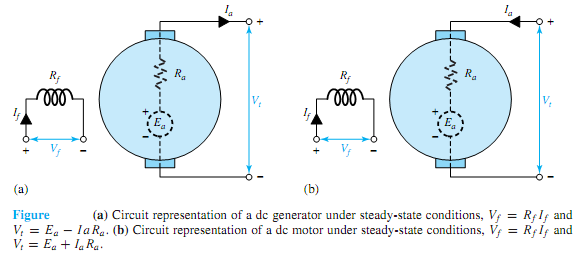
where the plus sign signifies a motor and the minus sign a generator. Vf is the voltage applied to the field circuit, If is the field current, and Rf is the field-winding resistance. Vt is the terminal voltage, Ea is the generated emf, Ia is the armature current, and Ra is the armature resistance. The generated emf Ea is given by Equation as
Ea = Kaφωm
which is the speed (motional) voltage induced in the armature circuit due to the flux of the stator-field current. The electromagnetic torque Te is given by Equation as
Te = KaφIa
where Ka is the design constant. The product EaIa, known as the electromagnetic power being converted, is related to the electromagnetic torque by the relation
Pem = EaIa = Teωm
For amotor, the terminal voltage is always greater than the generated emf, and the electromagnetic torque produces rotation against a load. For a generator, the terminal voltage is less than the generated emf, and the electromagnetic torque opposes that applied to the shaft by the prime mover.