The device is packaged in a 80 pin PLCC device as shown.The main groupings of the pins are as follows Port A PA0 - PA7 Parallel Port or Timer Port B PB0 - PB7 Parallel Port or High address bus for expansion Port C PC0 - PC7 Parallel Port or Data bus for expansion Port D PD0 - PD5 Parallel Port or Serial communication
Port E PE0 - PE7 Parallel Port or A/D conversion
Port F PF0 - PF7 Parallel Port or Low address bus for expansion
Port G PG0 - PG7 Parallel Port or Chip enables for expansion
XTAL/EXTAL Connections for crystal (F1N4 Version 4 MHz)
E System Clock output
4XOUT 4 times E clock
IRQ Interrupt request line (Active low)
XIRQ Non Masked interrupt request line (Active low)
MODA/MODB Inputs which set up the mode of operation
VRL/VRH A-D converter reference voltages
R/NW Read/write strobe for external expansion
Reset Bi-direction active low reset line for micro controller
VDD Power supply connection (+5Volts) Vss Power supply connection (0 Volts)
As you can see the design of a micro controller is fairly simple as most of the pins are used for the interfacing to the product. As previously mentioned the 68HC11 has four basic modes of operation, these can be set by hardware or software. The value of the pins MODA/B determines the mode of operation of the controller.
MODB MODA Operation
1 0 Normal single chip
1 1 Normal Expanded
0 0 Special Bootstrap
0 1 Special Test
The simplest is the normal single chip mode; this sets the 68HC11 as a self contained micro controller and has no external address or data bus. The 512 byte EEPROM would contain all the program code and is addressed at 0xfe00 - 0xfff. This provides the user with the full range of I/O functions. However because the EEPROM space is 512 byte, programs are usually small approx. 200 lines of program. For larger program space the 68HC11 is expanded with external address and data space, however this uses some of the I/O pins. The memory map for both configurations is shown below
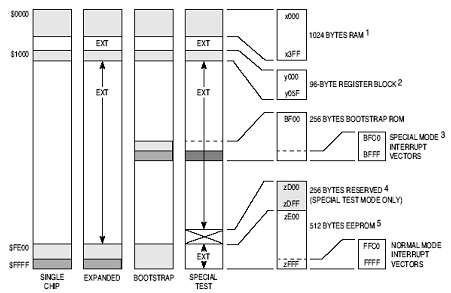
The remaining two modes are special, the first special mode is termed 'Bootstrap', this enables the designer to dynamically load up the controller with its program, instead of blowing the EEPROM externally. This is achieved by a resident program configuring the serial channel to accept the program code , transfer it into RAM and transfer control to it .This is quite useful for development work when using the single chip normal mode . The remaining mode is the Test mode, this enables the EEPROM and Interrupt vectors to be disabled and mapped externally. This allows the designer full control over the micro controller during development. This is useful if an emulator is not available.