Acquire a transformation matrix for perspective projection for a specified object projected onto x=3 plane as viewed by (5,0,0).
Solution: Plane of projection: x = 3 as given. Here assume that P (x, y, z) be any point in the space. We identify the parametric equation of a line AB, beginning from A and passing via B is like:
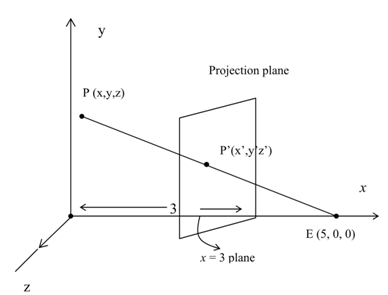
Figure: (i)
P (t) = A + t. (B - A), o < t < ∞
Consequently parametric equation of a line starting from E (5,0,0) and also passing via P (x, y, z) becomes:
E + t (P - E), o < t < ∞
= (5, 0, 0) + t [(x, y, z) - (5, 0, 0)]
= (5, 0, 0) + [t (x - 5), t. y, t. z]
= [t. (x - 5) + 5, t. y, t. z].
Suppose here Point P' is obtained, as t = t*
∴ P' = (x', y', z') = [t* (x - 5) + 5, t*y, t*. z]
Because, P' lies on x = 3 plane, consequently
t* (x - 5) + 5 = 3 should be actual;
t* = -2/(x - 5)
P' = (x',y',z') = (3,((-2.z)/(x-5)), ((-2.z)/(x-5)))
= ((3x-15)/(x- 5), (-2y)/(x - 5), (-2z)/(x - 5))
In Homogeneous coordinate system there is:
P' = (x', y', z', 1) = ((3x-15)/(x- 5), (-2y)/(x - 5), (-2z)/(x - 5), 1)
= (3x - 15, - 2.y, - 2.z, x - 5) --------------(1)
In Matrix form it will be:
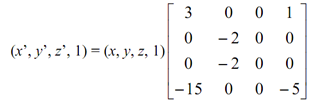
------------------------------(2)
Hence, as in above equation (2) is the needed transformation matrix for perspective view from (5, 0, 0).