Reference no: EM132076083
PROBLEMS
LTI Systems
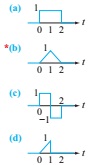
1 For each of the following systems, specify whether or not the system is: (i) linear and/or (ii) time-invariant.
(a) y(t) = 3x(t) + 1
*(b) y(t) = 3 sin(t) x(t)
(c) dy/dt + t y(t) = x(t)
(d) dy/dt + 2y(t) = 3 dx/dt
(e) y(t) = -∞∫tx(τ) dτ
(f) y(t) = 0∫t x(τ) dτ
(g) y(t) = t-1∫t+1 x(τ) dτ
2 For each of the following systems, specify whether or not the system is: (i) linear and/or (ii) time-invariant.
(a) y(t) = 3x(t - 1)
(b) y(t) = t x(t)
(c) dy/dt + y(t - 1) = x(t)
(d) dy/dt + 2y(t) = -∞∫tx(r) dr
(e) y(t) = x(t) u(t)
(f) y(t) = t∫∞ x(r) dr
(g) y(t) = t∫2t x(r) dr
3 Compute the impulse response of the LTI system whose step response is
4 Compute the impulse response of the LTI system whose step response is

5 The step response of an LTI system is

Compute the response of the system to the following inputs.
6 Compute the response y(t) of an initially uncharged RC circuit to a pulse x(t) of duration ∈, height 1/∈ and area ∈1/∈ = 1 for ∈ << 1 (Fig. P2.6).
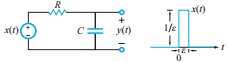
Fig. P2.6 Circuit and input pulse.
The power series for eax truncated to two terms is eax ≈ 1 + ax and is valid for ax << 1. Set a = ∈/RC and substitute the result in your answer. Show that y(t) simplifies to Eq. (2.17).
7 Plot the response of the RC circuit shown in Fig. P2.6 to the input shown in Fig. P2.7, given that RC = 1 s.

Fig. P2.7 Input pulse for Problem 2.7.
8 For the RC circuit shown in Fig. 2-5(a), apply the superposition principle to obtain the response y(t) to input:
(a) x1 (t) in Fig. P1.23(a) (in Chapter 1)
(b) x2 (t) in Fig. P1.23(b) (in Chapter 1)
(c) x3 (t) in Fig. P1.23(c) (in Chapter 1)
9 For the RC circuit shown in Fig. 2-5(a), obtain the response y(t) to input:
(a) x1(t) in Fig. P1.27(a) (in Chapter 1)
(b) x2(t) in Fig. P1.27(b) (in Chapter 1)
(c) x3(t) in Fig. P1.27(c) (in Chapter 1)
10 Functions x(t) and h(t) are both rectangular pulses, as shown in Fig. P2.10. Apply graphical convolution to determine y(t) = x(t) * h(t) given the following data.
(a) A = 1, B = 1, Ti =2s, T2=4s
(b) A = 2, B = 1, = 4 S , T2 = 2 s
(c) A = 1, B = 2, Ti = 4 s, T2 = 2 s.
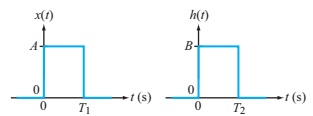
Figure P2.10: Waveforms of x(t) and h(t).
11 Apply graphical convolution to the waveforms of x(t) and h(t) shown in Fig. P2.11 to determine y(t) = x(t) * h(t).
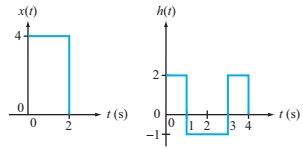
Figure P2.11: Waveforms for Problem 2.11
12 Functions x(t) and h(t) have the waveforms shown in Fig. P2.12. Determine and plot y(t) = x(t) * h(t) using the following methods.
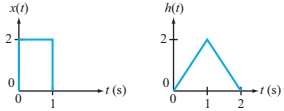
Figure P2.12: Waveforms for Problem 2.12.
(a) Integrating the convolution analytically.
(b) Integrating the convolution graphically.
13 Functions x(t) and h(t) have the waveforms shown in Fig. P2.13. Determine and plot y(t) = x(t) * h(t) using the following methods.
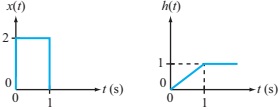
Figure P2.13: Waveforms for Problem 2.13.
(a) Integrating the convolution analytically.
(b) Integrating the convolution graphically.
14 Functions x(t) and h(t) are given by
x(t) = 0, for t < 0 : sin Πt, for 0 ≤ t ≤ 1s : 0, for t ≥ 1s
h(t) = u(t).
Determine y(t) = x(t) * h(t).
15 Compute the following convolutions without computing any integrals.
(a) u(t) * [δ(t) - 3δ(t - 1) + 2δ(t - 2)]
(b) u(t) * [2u(t) - 2u(t - 3)]
(c) u(t) * [(t - 1) u(t - 1)]
16 Compute the following convolutions without computing any integrals.
(a) δ(t - 2) * [u(t) - 3u(t - 1) + 2u(t - 2)]
(b) [δ(t) + 2δ(t - 1) + 3δ(t - 2)] * [4δ(t) + 5δ(t - 1)]
(c) u(t) * [u(t) - u(t - 2) - 28(t - 2)]
17 Compute the following convolutions.
(a) e-t u(t) * e-21 u(t)
(b) e-21 u(t) * e-3t u(t)
(c) e-3t u(t) * e-3t u(t)
18. Show that the overall impulse response of the interconnected system shown in Fig. P2.18 is h(t) = 0!
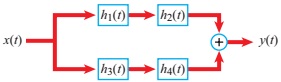
Figure P2.18: System of Problem 2.18
The impulse responses of the individual systems are
- h1(t) = e-t u(t) - e-2t u(t),
- h2(t) = e-3t u(t),
- h3(t) = e-3t u(t) - e-2t u(t),
- h4(t) = e-t u(t).
19. Prove the following convolution properties.
(a) The convolution of two even functions is an even function.
(b) The convolution of an even function and an odd function is an odd function.
(c) The convolution of two odd functions is an even function.
20. Describe in words what this cascade connection of LTI systems does.

21. Compute the response of an initially uncharged RC circuit with RC = 1 to the input voltage shown in Fig. P2.21, using the following methods.

(a) Computing the appropriate convolution
(b) Writing the input in terms of delayed and scaled step and ramp functions
22. Determine whether or not each of the LTI systems whose impulse responses are specified below are (i) causal and/or (ii) BIBO stable.
(a) h(t) = e-|t|
(b) h(t) = (1 - |t|)[u(t + 1) - u(t - 1)]
(c) h(t) = e2t u(-t)
(d) h(t) = e2tu(t)
(e) h(t) = cos(2t)u(t)
(1) h(t) = 1/(t+1) u(t)
23. Determine whether or not each of the following LTI systems is (i) causal and/or (ii) BIBO stable. If the system is not BIBO stable, provide an example of a bounded input that yields an unbounded output.
(a) y(t) = dx/dt
(b) y(t) = -∞∫t x(τ) dτ
(c) y(t) = -∞∫t x(τ) cos(t - τ) dτ
*(d) y(t) = x(t + 1)
(e) y(t) = t-1∫t+1 x(τ) dτ
(f) y(t) = t∫∞ x(r) e2(t-τ)dr
24. This problem demonstrates the significance of absolute integrability of the impulse response for BIBO stability of LTI systems. An LTI system has impulse response
h(t) = ∑n=1∞ (-1)n/n δ(t- n).
(a) Show that h(t) is integrable: -∞∫∞ h(t) dt < ∞.
(b) Show that h(t) is not absolutely integrable:
-∞∫∞ |h(t) dt → ∞.
(c) Provide an example of a bounded input x(t) that yields an unbounded output.
25. An LTI system has impulse response
h(t) = (1/ta) u(t - 1). Show that the system is BIBO stable if a > 1.
26. Prove the following statements.
(a) Parallel connections of BIBO-stable systems are BIBO stable.
(b) Parallel connections of causal systems are causal.
27. Prove the following statements.
(a) Series connection of BIBO-stable systems are BIBO stable.
(b) Series connections of causal systems are causal.
28. An LTI system has an impulse response given by h(t) = 2 cos(t) u(t).
Obtain the response to input x (t) = 2 cos(t) u (t) and determine whether or not the system is BIBO-stable.
Section : LTI Sinusoidal Response
29. An LTI system has the frequency response function H(ω) = 1/(jω + 3).
Compute the output if the input is
(a) x(t) = 3
(b) x(t) = 3√2 cos(3t)
*(c) x(t) = 5 cos(4t)
(d) x(t) = 8(t)
(e) x(t) = u(t)
(f) x(t) = 1
30. An LTI system is described by the LCCDE
d2y/dt2 + 2dy/dt + 7y = 5.dx/dt
Its input is x(t) = cos(ωt).
(a) If ω = 2 rad/s, compute the output y(t).
(b) Find the frequency ω so that y(t) = A cos(ωt) for some constant A > 0. That is, the input and output sinusoids are in phase.
31. An LTI system has the impulse response
h(t) = e-12tu(t).
The input to the system is
x(t) = 12 + 26 cos(5t) + 45 cos(9t) + 80 cos(16t).
Compute the output y(t).
32. An LTI system has the impulse response
h(t) = 5e-t u(t) - 16e-2t u(t) 13e-3tu(t).
The input is x(t) = 7 cos(2t + 25°). Compute the output y(t).
33. Repeat Problem 2.32 after replacing the input with x(t) = 6 + 10 cos(t) + 13 cos(2t).
34.
If
cos (ωt) → δ(t) - 2ae-at(t) → A cos(cos (ωt + θ),
prove that A = 1 for any ω and any real a > 0.
35 If
cos(ωt) → h(t) → h(-t) → A cos(ωt + θ),
prove that θ = 0 for any co and any real h(t).
36. We observe the following input-output pair for an LTI system:
- x(t) = 1 + 2 cos(t) + 3 cos(2t)
- y(t) = 6 cos(t) + 6 cos(2t)
- x(t) → LTI → y(t)
Determine y(t) in response to a new input
x(t) = 4 + 4cos(t) + 2cos(2t)
37. We observe the following input-output pair for an LTI system:
- x(t) = u(t) + 2 cos(2t)
- y(t) = u(t) - e-2t u(t) .Nr2 COS(2t - 45°)
- x(t) → LTI → y(t)
38. Determine y(t) in response to a new input
x(t) = 5u(t - 3) + 3√2cos(2t - 60°).
Compute the convolution of the two signals:
- x (t) = 60√2 cos(3t) + 60√2 cos(4t)
- h(t) = e-3t u(t) - e-4t u(t)
39. Compute the convolution of the two signals:
- x1 (t) = 60,√2 (ej3t + ei4t)
- x2(t) = e-3t u(t) - e-4t u(t)
40. An inductor is modeled as an ideal inductor in series with a resistor representing the coil resistance. A current sine-wave generator delivers a current i(t) = cos(500t) + cos(900t) through the inductor, as shown in Fig. P2.40. The voltage across the inductor is measured to be v(t) = 13 cos(500t + θ1) + 15 cos(900t + θ2), where the current is in amps and the voltage in volts and phase angles θ1 and θ2 are unknown. Compute the inductance L and coil resistance R.
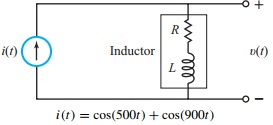
Figure P2.40: Circuit for Problem 2.40.
A system is modeled as
dt/dt + a y(t) = b dx/dt + c x(t),
where the constants a, b, and c are all unknown. The response to input x(t) = 9 + 15 cos(12t) is output
y(t) = 5 + 13 cos(12t + 0.2487).
Determine constants a, b, and c.
42. Show that the circuit in Fig. P2.42 is all pass. Specifically:
(a) Show that its gain is unity at all frequencies.
(b) Find the frequency ωo, in terms of R and C, for which if v1 (t) = cos(ω0t) then v2(t) = sin(ω0t). This is called a 90-degree phase shifter.
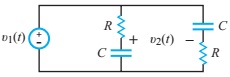
Figure P2.42: Circuit for Problem 2.42.
Section 8: Second-Order LCCDE
43 An LTI system is described by the LCCDE
d2y/dt2 + Bdy/dt + 25y(t) = dx/dt + 23x(t).
Compute the range of values of constant B so that the system impulse response is
(a) Overdamped (non-oscillatory)
(b) Underdamped (oscillatory)
*(c) Unstable (blows up)
If B = 26, compute the impulse response h(t).
44 An LTI system is described by the LCCDE
d2y/dt2 + B dy/dt+ 49y(t) = 21√3x(t).
Compute the range of values of constant B so that the system impulse response is
(a) Overdamped (non-oscillatory)
(b) Underdamped (oscillatory)
(c) Unstable (blows up)
If B = 7, compute the impulse response h(t).
45. A series RLC circuit with L = 10 mH and C = 1 μF is connected to an input voltage source vin(t). Output voltage vout (t) is taken across the resistor. For what value of R is the circuit step response critically damped?
46. A parallel RLC circuit with L = 10 mH and C = 1 μF is connected to an input source iin(t). The system output is current iout (t) flowing through the inductor. For what value of R is the circuit step response critically damped?
Section: Car Suspension System For each of the following four problems:
- Total truck mass is 4 metric tons (i.e., one metric ton per wheel).
- Spring constant is 105 N/m.
- Viscous damper is 5 x 104 Ns/m.
47 A truck is driven over a curb 10 cm high. Compute the truck displacement.
48 A truck is driven over a pothole 5 cm deep and 1 m wide at 5 m/s. Compute the truck displacement.
49 A truck is driven up a ramp 5 m long with a 10% slope at 5 m/s. Compute the truck displacement.

50 A truck is driven across a wavy pavement with a 1cm amplitude and 1cm period. The truck speed is 5 m/s. Compute the truck displacement.
51 For a truck with the specified mass and spring constant, what should the viscous damper be for a critically damped response?
LabVIEW Module 2.1
52 Use LabVIEW Module 2.1 to compute and display the convolution e-t u(t)*e-10t u(t). This is the response of an RC circuit with RC = 1 to input e-10t u(t).
53 Use LabVIEW Module 2.1 with one signal given by e-5t u(t). Choose a in e' u(t) of the second signal so that e-5t u(t) * e' u(t) decays to zero as rapidly as possible. Explain your result.
54 In LabVIEW Module 2.1, let the two inputs be e-atu(t) and e-bt u(t). Choose a and b so that e-btu(t)*e-btu(t) decays to zero as rapidly as possible.
55 In LabVIEW Module 2.1, compute and display e-5t u(t)*e-5tu(t). Explain why the analytic plot is blank but the numeric plot shows the correct result.
LabVIEW Module 2.2
56 In LabVIEW Module 2.2, for a car mass of 1500 kg, a spring constant of 100000 N/m, and a damping coefficient of 5000 Ns/m, compute and display the response to a curb of amplitude 2 cm.
57 In LabVIEW Module 2.2, for a car mass of 1500 kg, a spring constant of 150000 N/m, and a damping coefficient of 5000 Ns/m, compute and display the response to a curb of amplitude 4 cm.
58 In LabVIEW Module 2.2, for a car mass of 1000 kg, a spring constant of 100000 N/m, and a curb of height 4 cm, find the value of the damping coefficient that makes the response decay to zero and stay there as quickly as possible.
59 In LabVIEW Module 2.2, for a car mass of 1000 kg, a spring constant of 100000 N/m, and a damping coefficient of 5000 Ns/m, compute and display the response to a pothole of depth 10 cm and width of 1 m at a speed of 4 m/s.
60 In LabVIEW Module 2.2, for a car mass of 1500 kg, a spring constant of 150000 N/m, and a damping coefficient of 5000 Ns/m, compute and display the response to a (small) pothole of depth 0.1 cm and width of 0.1 m at a speed of 2 m/s.
61 In LabVIEW Module 2.2, experiment with different values of the car mass, spring constant, damping coefficient, and pavement period within the ranges allowed to find the values that minimize the amplitude of the car response to the amplitude of a wavy pavement.
62 In LabVIEW Module 2.2, experiment with different values of the car mass, spring constant, damping coefficient, and pavement period within the ranges allowed to find the values that make the car response match the wavy pavement as much as possible (similar amplitude and minimal phase difference).
63 In LabVIEW Module 2.2, for a car mass of 1500 kg, a spring constant of 150000 N/m, and a damping coefficient of 5000 Ns/m, find the speed that makes the smoothest ride (minimal cusp) over a pothole of depth 10 cm and width of 1 m.