Reference no: EM13945572
Description
The purpose of this project is to derive the governing equations of motion for a two degree of freedom (planar) gantry-type robot that is commonly called an H-Bot (Fig. 1). An H-Bot is a variation of a cable driven parallel robot. Unlike most parallel robots, the actuators are fixed in space which allows for the endeffector to have a reduced inertia. The reduced inertia permits larger accelerations of the end-effector. The H-bot further differs from classical cable driven parallel robots in that it consists of a single toothed belt rather than multiple cables.
The kinematics of the H-Bot follow a vector combination of directions (i.e., a coordinate transformation of 45o relative to the plane of operation). Rotating one motor while keeping the other stationary causes the end-effector to move at a 45o angle relative to the line connecting the motors. Rotating the opposite motor causes the end-effector to move at a 135o angle. These two vectors can then be combined to achieve planar motion. For example, rotating the motors in opposite directions causes vertical motion of the end-effector;
similarily, rotating the motors in the same direction causes horizontal motion.
In order to properly size the actuators and to better understand how this type of mechanism works, it is important to understand the dynamics of the robot. Dynamic simulation of these types of mechanisms in standard CAE packages is diffifcult due to properly modeling the continuous belt interacting with a moving pulley. However, analytical derivation of these equations are straightforward and provide a more information rich expression of how the mechanism is coupled. In your project, the equations of motion will be derived using a Newton-Euler (NE) approach.
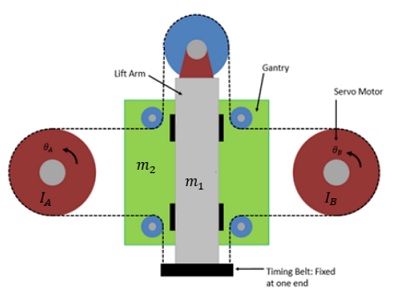
The H-Bot has the following parameters:
- m1, mass of the lift arm [kg]
- m2, mass of the gantry [kg]
- IA, inertia of motor A [kg · m2]
- IB, inertia of motor B [kg · m2]
- r, radius of the driving motors' pulleys [m]
- rA, torque produced driving motor A [Nm]
- rB, torque produced by driving motor B [Nm]
- g, acceleration due to gravity [m/s2]
Assumptions
In any mathematical derivation, it is important to specify all assumptions. We will assume the following.
1. The H-Bot is mounted VERTICALLY, and therefore the effects of gravity are included.
2. The belt is massless and does not slip.
3. All bodies are rigid.
4. There exists no friction in the joints.
5. The inertias of the pulleys are ignored.
Project Tasks
Please complete the following tasks to obtain the equations of motion of this machine.
1. Draw free body diagrams for each independent rigid body. In this problem there are four bodies. These are the lift arm, gantry, and the two fixed motors.
2. Select coordinate systems for each body. The coordinate systems should be either located at the center of mass of the body or at a fixed point in space.
3. Determine the angular acceleration, angular velocity, and inertia in each of the coordinate systems.
4. Determine the kinematic constraints.
5. Form the moment equations for each body. Be sure that positive moments are in accordance with the right hand rule.
6. Form the force equations. Determine the force equations for each body.
7. Equation substitution and manipulation. Manipulate the equations and make appropriate substitutions such that you get two equations in the following form:
rA = f (θ A, θ B, m1, m2, IA, r, g)
rB = f (θ A, θ B, m1, m2, IB, r, g)