Reference no: EM133119135
CE801 Intelligent Systems and Robotics - University of Essex
Learning outcome 1: To describe a variety of autonomous mobile robots you have learnt in this course.
Learning outcome 2: To be familiar with Robot Operating System (ROS) and use it to do this assignment.
Learning outcome 3: To design, program and evaluate mobile robots from sensing to action.
Learning outcome 4: To produce a report on your design and implementation of the challenge tasks below.
Navigation tasks
Task 1: Figure 1 shows the robot and its environment (1 room with 4 pillars and 1 charger), which is used for your assignment. Based on it, you should adopt a PID algorithm to control the simulated robot moving from home to the charger. More specifically,
» You should write C/C++ code to implement a PID control algorithm in a ROS environment.
» Your code should drive the robot to go through two gaps and stop at the charger position.
» The parameters of the PID controller should be adjusted to make the trajectory smooth.
» The odometry and laser data should be collected and saved into files for plotting.
Task 2: You should adopt a Fuzzy controller to control the simulated robot moving from home to the charger in an environment shown in Figure 1. More specifically,
» You should write C/C++ code to implement a Fuzzy controller in a ROS environment.
» Your code should drive the robot to go through two gaps and stop at the charger position.
» The parameters of the Fuzzy controller should be adjusted to make the trajectory smooth.
» The odometry and laser data should be collected and saved into files for plotting.
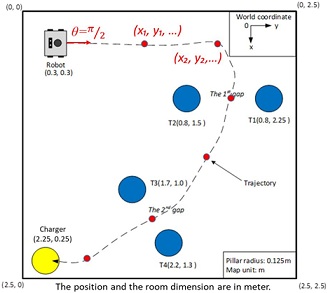
Figure 1 The robot navigation in an indoor environment
1) The cover page (1 page):
Write your registration number and the code of the course module clearly on the cover page of your assignment; include a table of contents for easy to navigate.
2) Introduction (3 - 4 pages):
You should describe a variety of mobile robots in terms of platforms and mobility, as well as internal and external sensors you have learnt in this course, e.g., why they are required and how they differ.
3) Implementation of Task 1 (2 - 3 pages):
» To explain your PID control strategy for this task.
» To present a flowchart for your PID control code.
» To run your PID control code for the required task in ROS and collect data.
» To create the robot trajectory, velocity, and laser data graphs with explanation.
4) Implementation of Task 2 (2 - 3 pages):
» To explain your Fuzzy control strategy for this task.
» To present a flowchart for your Fuzzy control code.
» To run your Fuzzy control code for the required task in ROS and collect data.
» To create the robot trajectory, velocity, and laser data graphs, and explain them.
5) Appendix (5 - 6 pages):
To list your C/C++ programs written for two tasks above, with some clear comments for easy reading and understanding. All words here are counted.