Reference no: EM132392821
ENGIN5304 Advanced Robotics Assignment, Faculty of Science and Technology - Federation University, Australia
For the robot shown in the figure below, Calculate degrees of freedom.
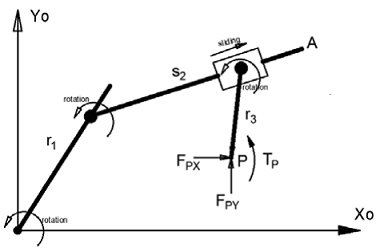
It is required to place the robot hand at the following pose; x=58.54mm, y=29.20mm and α = 2.44 rad, where the maximum unaccounted for load applied at point P is expected to be (0 N, 1 N, 0 Nm)
The stiffness of the three rotary joints as counting from the ground up are given respectively as 10000, 8000 and 6000 Nm/rad.
Given the following dimensions: r1=160mm, r3=30mm,
Find the best value for S2.
Hint: S2_min = 90mm and S2_max= 190mm.
With the hand orientation maintained unchanged, point P is now required to move vertically downwards 15mm from the starting point, perform the following:
Graph the joint angles against the y values.
If the above load remains, graph the radial error against the y values.
Neatness, adequacy and formatting of the report and graphs.
Expectation:
Neatly typed report to explain the theory and process used with typed equations to describe the mathematical models.
Matlab code to show the workings of the problem and the obtained results.
A conclusion at the end of the report to discuss the results.