Reference no: EM132263453
Question 1
(a) In order for a dc motor to produce a nominal torque of 20 Nm, it has been determined that the rotor's radial surface area must be 0.3 m2 to obtain sufficiently high flux. Select the radius and axial length of the rotor so that the nominal acceleration when the motor is not loaded mechanically is at least 50 rad/s2. The rotor can be assumed to have a mass density of 7500 kg/m3.
(b) In many applications, a motor drives a load which consists of two or more rotating bodies interconnected by geared wheels, as in Figure Q1(a). The gears engage at the point P. The wheels are axially coupled to rotating bodies with inertias J1 and J2, respectively. Suppose that, as shown in the figure, an electrical motor applies a torque τe on the wheel with radius r1.
(i) Find the relation between the angular speeds ω1 and ω2
(ii) Show that, as "seen" from the applied torque, the total inertia of the system is
J = J1 + (r1/r2)2J2
Hint: At the point P, the peripheral speeds v1 and v2 are equal, as are the tangential
forces F1 and F2. Furthermore: τ = Fr, v = ωr.
(c) Shown in Figure Q1(b) is a hoist drive, a motor with torque τe drives a hoist with mass m using a wheel of radius r and inertia J. The gravitational force is mg. The dynamics of the drive can be described as
j' dω/dt = τe - τl
Find expressions for the equivalent inertia J′ (which is larger than J due to the mass m) and the load torque τl.

Figure Q1. (a) Two rotating bodies interconnected by geared wheels. (b) Hoist drive. 1
Question 2
(a) A dc motor with armature resistance 0.3 Ω is started by direct connection to a 100-V source. After 5.5 s the speed has reached 120 rad/s. The speed then settles to 150 rad/s in the steady state. Determine the total inertia and the motor's flux linkage.
(b) A dc motor with total inertia 1.8 kgm2 and armature resistance 0.5 Ω is fed from a 200-V source and is rotating with 1500 rpm. An external load torque ΓL = 30 Nm is applied at t = 0 s. Calculate the speed at t = 1.5 s. Hint: The dynamics are modified to;
RJ.dωr/dt = Ψv -RτL - Ψ2ωΤ
(c) A dc motor with R = 4 Ω and ψ = 2 Vs is driving a load with a relatively high total inertia: J = 8 kgm2. The viscous damping is not negligible, but the constant b is unknown. To find b, an experiment is conducted. A 48-V source is connected to the motor's armature terminals, and the motor is allowed to accelerate, taking 15.3 s to attain 90% of the steady-state speed. Find b and the steady-state speed.
Question 3
A dc motor has the following per-unit parameters: L = 0.2, R = 0.1, ψ =1, J = 200, and b = 0.1. The base speed is 100 rad/s.
(a) Determine the efficiency η = output power/input power at nominal speed and load.
(b) Determine the armature current and speed in per-unit values at nominal load if the flux is reduced such that ψ = 0.2 pu.
(c) The drive control system for the dc motor, which uses a PWM converter with a 1-kHz switching frequency and a DSP sampling at 2 kHz, the current control law is pre-coded in the following way (excluding antiwindup and saturation):
νref = KP(βiref - i) + ki∫(iref - i)dt
This is a two-degrees-of-freedom PI controller that uses the so-called "set point weighting" algorithm (factor β). The parameters are free to select by the operator. Determine the parameters according to given specifications (NOTE: Please contact the lecturer after Week 02 for your individual specifications).
(d) Design a one degree of freedom outer PI controller using Internal Model Control approach to control the speed of the DC motor (keep the closed loop speed controller bandwidth to be 0.1 times the current controller bandwidth).
(e) Develop a SIMULINK model for the complete DC drive system and present simulated waveforms to prove that your closed loop current controller as well as the closed loop speed controller performs according to the design specifications.
Question 4:
(a) A three-phase voltage system can be written as
νa(t) = V^a cos(ωt + φa)
νb(t) = V^b cos(ω1t - 2Π/3 + φb)
νc(t) = V^c cos(ω1t - 4Π/3 + φc)
In this three-phase system, the peak values are as follows;
V^a = 591V V^b = 673V V^c = 465 V
and the phase angles are
φa = 11.7° φb = -5.7° φc = 6.5°
I. Calculate the zero sequence component and hence show that it is negligible
II. Using Euler's relations, obtain the corresponding space vector and express it of the form VsKAej1t Be j 1t C , (K is the scaling constant while A, B and C need to be found)
(b) At a certain time instant, an rms-value-scaled space vector is given as Vs 130 j 75 V. A zero-sequence component exists, whose instantaneous value is 9 V. Determine the instantaneous values of the phase voltages.
(c) Block diagram for the αβ (i.e. dq to αβ) transformation is given below;
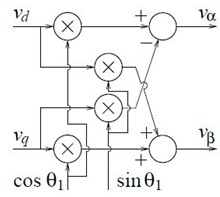
Modify this to obtain dq (i.e. αβ to dq) transformation.
(d) Using the matrix correspondence J to the imaginary unit j, as given by j 0 1 , should logically allow the correspondence,
vs = ejθ1V ⇔ vs = ejθ1V
That is, ejθ1 = Tαβ
Prove this.