Reference no: EM131725918
Problem 1: Consider the following SISO system (that can be shown to be controllable and observable):
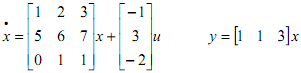
Design a reduced-order observer for the system using two different methods and verify the design either in MATLAB CST or in MATLAB Simulink:
1.1 The method based on matrix partitioning
1.2 Lyapunov equation method
Problem 2: Consider the following scalar linear quadratic regulator control system:
x•(t) + 5x(t) = 2u(t) J = 0∫T[Lx2(t) + Ru2(t)dt + Qx(T)2]
2.1 Assume that T = 5 and L = 1 and it is desired that ideally x(T) = 0, or practically x(T) should be near zero. Solve and compare two solutions of the system, one for R = 2 and Q = 0.5 and another for R = 0.5 and Q = 2. In order to compare the solutions via Simulink, find first, in each case, the value of the Riccati Equation solution K(t) at t=0. Then allow the Riccati Equation to propagate forward in time, along with the system, in order to generate the time varying state feedback gain. Let the simulation generate (in addition, and side by side with the system model and the Riccati equation) the performance measure J, as it just requires one more integrator. Stop the simulation at t = 5, or very shortly after.
2.2 Let T = ∞, L = 1, Q = 0 and R = 1. Solve the Algebraic Riccati Equation and then find the optimal quadratic regulator controller. Demonstrate the optimal performance of the system, compared to any other stabilizing state feedback control.
Problem 3: Consider the following infinite horizon least squares quadratic regulator LTI system:
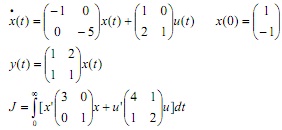
3.1 Find the solution of the Algebraic Riccati Equation, the optimal control signal (or state feedback strategy) and demonstrate the system in Simulink. Compare to one or more other systems, one of which that uses the same control but has different initial conditions, and another that has the same initial conditions but a slightly different control.
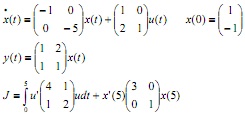
3.2 Consider now a different control strategy for the same system, involving a control effort cost combined with final state cost:
Problem 4: A linear time invariant system is given in terms of its transfer function matrix:
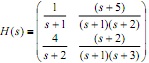
Need to find state variable realizations (A,B,C) to H(s), as follows:
A controllable realization (which is not necessarily a minimal realization)
An observable realization (which is not necessarily a minimal realization)
The system's McMillan degree, and consequently a minimal realization. That is, a controllable and observable realization, that will consequently feature an nxn A matrix with the lowest possible order n.