Reference no: EM131301127
How to use PID controller to ensure a robot car run a specified degree with PID controller. And the inbuilt PID controller is disabled.
Objectives
1. Build a robotic car
2. Understand PID control design for robots
3. Design a PID controller. Tune a PID controller
Equipment
1. LEGOS NXT Robotic kit
2. PC to NXT USB cable
3. Computer with RobotC installed
Background
The car robot we are using is a differential drive car robot as it has two motorized wheels that provide drive and steering functions.There are some basic problems with this program. The car may not go straight as the two motors may not have the same speed even though we have commanded both of them to be at a specified power. This can be due to the different construction of the two motors as well as different outside environment for the two wheels. One motor my rotate faster than the other causing the car to drift. To counter these effects, we can use ROBOTC's inbuilt PID control function or we can build our own PID controller to ensure the car will run a specified degree.
Task
1. Build a LEGO NXT Robot car. Instructions are provided in the LEGO MINDSTORM's instruction manual. For testing, keep the robotic car upside down for design. Keep the robot fully charged, as design solution may change if the battery power changes.
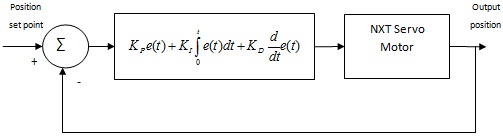
Figure: PID control for NXT position control
2. In ROBOTC, write a code for the PID controller. Define the error signal as the actual angle of the encoder and angle set point (target angle). The angle set point is 500 degrees. The motor should run for 10s.
a. It is important to disable all inbuilt ROBOTC PID control functions. This can be done using the commands shown below. Do not use any inbuilt ROBOTC PID control function.
nMotorPIDSpeedCtrl[motorA] = mtrNoReg;//disable NXT inbuilt PID
nMotorPIDSpeedCtrl[motorB] = mtrNoReg;//disable NXT inbuilt PID
nSyncedMotors = synchNone;//disable NXT inbuilt PID
b. Provide a soft copy (.c) of the code as well as put in the project report. The code should not be unnecessary complex and should be well commented explaining the functioning of the program.
3. Tune the PID controller by following the steps below
a. Use the Ziegler-Nichols (Z-N) method to find Ku and Tu. Draw a plot showing sustained oscillations and period of the oscillations. An example plot is shown in figure 3.5. Provide the values of Ku and Tu.
b. Using the values of Ku and Tu, show the initial tuned performance of the PID controller. Provide the rise time, percentage overshoot and settling time (± 5%)
c. Tune the PID values further for a maximum percent overshoot Mp< 6% , settling time < 1.2 sec (2% scenario) and steady state error of < 1.3 %.
4. Design a PID controller for speed control using the set point speed to 250 degrees per second. Tune the PID values for a percent overshoot < 7%, settling time < 1.5 s (5% scenario) and steady state error of < 10%.
|
Project-problem resolution in corrections
: You are the Director of Programs for a large state correctional system. The Commissioner comes to you with three (3) assignments. Each assignment has specific goals. Unfortunately, achievement of these goals cannot require an increase in the syste..
|
|
Describe fredas possible liability and the various defenses
: Describe Freda's possible liability and the various defenses to or modifications of liability that her lawyer may try to employ in her defense.? Describe the types of liability risk exposures Pharmacy On-Line is facing as a result of Erin's action.
|
|
Illustrate an instance of contemporary ethical relativism
: Compare and contrast the ethical relativism of ancient Sophism (especially according to Thrasymachus) with that of contemporary postmodernism (especially according to Rorty).Assess one major strength and one major weakness of ethical relativism.Bri..
|
|
Rules during the process of resolvinig conflict
: After reading your post the word 'involved' is critical to resolving or moving forward with conflict. Involvement requires rules during the process of resolvinig conflict.
|
|
Design a PID controller for speed control
: PID CONTROLLER - Design a PID controller for speed control using the set point speed to 250 degrees per second. Tune the PID values for a percent overshoot
|
|
Conduct a needs assessment
: Describe how you would conduct a needs assessment. Include a list of questions you would ask AND to whom you would ask them. REMEMBER: You are trying to determine what training needs are.
|
|
Determine where diminishing product begins
: The following table shows a short-run production function for laptop computers. Use the data to determine where diminishing product begins.
|
|
Describe the interested parties and prospective
: Describe the interested parties and their prospective goals in this negotiation. Analyze the parties' dependencies and motivations and propose four options in this negotiation so that all parties' goals are met.
|
|
Evaluate the current myers-briggs type indicator
: Evaluate the current Myers-Briggs Type Indicator (MBTI) personality instrument, which is based on Jung's theories, and provide your impression of your chosen figure or character through the major facets of the MBTI. Analyze how ethical issues mig..
|