Reference no: EM131904794
Robotics Midterm Exam
Instruction - There are two problems requiring written answers as well as MATLAB programming. In order to receive full credit, you must clearly explain your assumptions, reasoning, and results.
Problem 1 - Manipulator kinematics
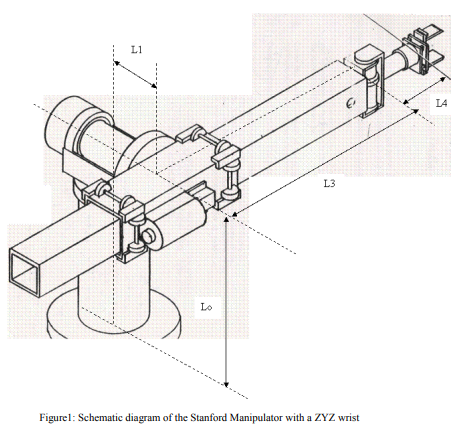
Consider the "Stanford-like" manipulator shown in Figure 1. The manipulator has six degrees of freedom (2R+P+3R), and its end-effector (gripper) is mounted onto a ZYZ wrist (similar to the wrist of PUMA 560). Your tasks are as follows:
A) Set up the kinematic equations describing the position and orientation of the center of the gripper using the DH framework. Clearly sketch your choice of coordinate frames.
B) Repeat a) using the product of exponential formulas. Show that if you have chosen the same tool coordinate frame system in both cases, you get identical results.
C) Calculate the 6x6 Jacobian, and identify the singularities (Hint: see problem 2 parts D and E).
D) Pick reasonable values for the manipulator dimensions and animate the robot using the robotics MATLAB toolbox. Assume that the initial joint configuration is (0 0 0 0 0 0)T, and the final joint configuration is (π π/3 0.5 π/3 π/3 π/3)T. Animate the robot during a pick and place sequence of a short vertical peg between two locations of your choosing on the robot base plane.
Problem 2 - Jacobians
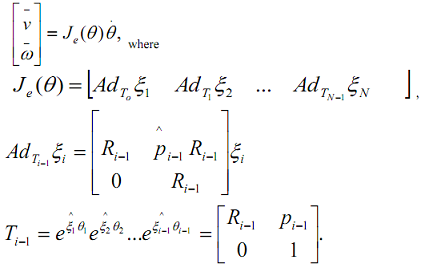
The Manipulator Jacobian was defined using the matrix exponentials as the mapping between the twist of the tool coordinate frame and the joint angular velocity. That means that the tool twist expressed in base frame evolves according to:
A) Is the first joint is revolute, show that:

B) Explain why the quantity ξ'i = AdT_i-1ξi is the twist ξi expressed in the base frame, after undergoing rotations and translations associated to moving the joints from 0 to joint coordinates θ1 , θ2 , ... θN.
C) Because of B), you now have a very simple way of finding singularities for different types of manipulators, by writing: Je(θ) = [ξ'1 ξ'2 ... ξ'N]. Use this property to show that the following robot configurations are singular:
- Four coplanar revolute joints
- A prismatic joint perpendicular to two parallel revolute joints.
- Three parallel coplanar revolute joints.
D) The conventional definition of the robot Jacobian relates the velocity of the robot tool in the base frame, that is: d/dt p(θ) - Jc(θ)θ. In class we saw that Je(θ) =  , e.g. the Jacobian is composed of two parts, corresponding to velocity and angular velocity, respectively. Show that in fact Jp and Jc are not identical, and that: Jc = Jp - p^Jo, where p(θ) is the position of the robot tool.
, e.g. the Jacobian is composed of two parts, corresponding to velocity and angular velocity, respectively. Show that in fact Jp and Jc are not identical, and that: Jc = Jp - p^Jo, where p(θ) is the position of the robot tool.
E) Show that the robot singular configurations are the same as the singularities of the matrix J = .
.