Reference no: EM133094526
Question 1: Consider the following transfer function which describes the single axis rotational dynamics of a satellite in orbit.
G(s) =1/s2
a) State the system type number.
b) Derive the closed loop transfer function for this system under proportional control, with proportional gain denoted as Kp.
c) Explain why proportional-only control is insufficient with reference to your answer to a).
d) Suggest an appropriate type of controller, additionally incorporating integral OR derivative action.
e) If unity proportional gain is used, suggest an integral OR derivative gain which would yield a step response with a settling time of less than 10s, with no overshoot or oscillation.
Question 2: Consider the following process transfer function;
G(s) = 5/(1+4s)
a) State which of the following tuning methods can be used to obtain a closed loop response with no overshoot, and to meet a given settling time specification;
i) Ziegler-Nichols ii) Cohen-Coon iii) Direct Design Synthesis
b) Determine a set of Kp and Ki values for this system under PI control which would yield a settling time of approximately 15s, with no overshoot.
c) If a 2 second time delay is added to the process, like below, with the same PI controller parameters, how does the response deteriorate?
G(s) = 5e-2s/(1+4s)
d) Retune the controller to meet the specification in a), when the 2 second delay is present.
e) Which parameter, Kp or Ki, required altering the most in order to re-meet the given response specification?
Question 3: Figure 1 shows a simplified control scheme for a jacketed reactor, where the temperature of a product undergoing an exothermic reaction is maintained through the control of a flow of cooling water through the jacket.
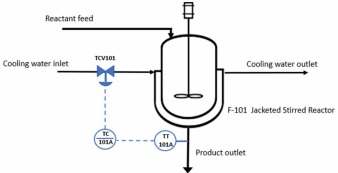
In manual mode, the system step response is as shown in Appendix A, and can also be obtained by running the Simulink model Tank.mdl
a) Inspect the process response, particularly the beginning of the transient region, do you think this process is first order, or higher order?
b) State whether the observed delay is a true delay, or an apparent delay.
c) Obtain a first order plus dead time (FOPDT) model for this process.
d) Using an appropriate tuning method and the model obtained for b), obtain suitable parameters for a PI controller which will yield a closed loop step settling time of less than 50s, with minimal overshoot.
e) If a cooling water disturbance of +1 is added at 50s, describe how the closed loop system reacts. Is the effect of the disturbance reduced? Does the process regain zero set- point tracking error?
Question 4:
a) State the non-linearity shown in Figure 2, which is always present in practical real-world systems.

b) Name the phenomenon which causes the output of an integrator to increase indefinitely, when an error persists because the process ceases to behaviour in a linear fashion.
c) Suggest a solution to the above problem.
d) State why, in practice, it is impossible to implement pure derivative action. Also, what is the effect of derivative action with regards to high frequency noise?
e) How then, can derivative action be implemented in practice? Also, how does this solution also improve the sensitivity to high frequency noise?
Attachment:- Transfer function.rar