Reference no: EM131101755
E28: Mobile Robotics - Fall 2015 - HOMEWORK 2
1. Closed loops in pose networks

WALL-E has picked up a compressed block of trash, and forms the pose network illustrated on the right.
a. Write out TLSG, and TWLS as compositions of the transforms above.
b. Write TRHW and TGRH as compositions of the transforms above.
c. Let M be the composition given by
M = (TLHG)-1(TLSLH)-1(TBLS)-1 TBRS TRSRH TRHG
What must be the rotation matrix and translation vector of M?
2. Rigid transformations with multiple robots
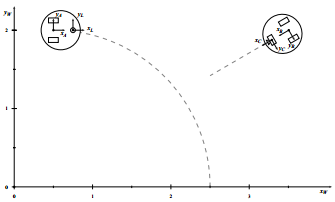
Two robots A and B are situated in the plane as depicted above. Robot A is carrying a light L, and robot B is carrying a camera C, both of which are rigidly attached to the robots. The relative transformations from each robot to its respective payload can be obtained by translating forward 0.25 m along each robot's x-axis.
The motion of robot A in the world frame is given by
x(t) = 0.5 + 2sin πt/10, y(t) = 2cos πt/10, θ(t) = = -( πt/10)
and the motion of robot B is given by
x(t) = 3.5 +0.25 cos(7π/6)t, y(t) = 2.0 + 0.25 sin (7π/6) t, θ(t) = 7π/6
a. Define the rigid transformations TWA, TWB, TLA, and TCB at time t = 0 in terms of their rotation matrix R and translation vector t. You should explicitly write out all of the matrix and vector elements (although it's ok to leave the cos and sin terms in).
b. Draw the pose network graph corresponding to the transforms listed above.
c. What composition of the transformations above maps coordinates from the frame of robot A to the frame of the camera?
d. Write a computer program to plot the position of the light L in the coordinate frame of the camera C as a function of time. You should have two separate plots x(t) and y(t) with t ranging from 0 to 5 seconds. Submit printouts of your code and the graphs.
3. Braitenberg vehicles
I have put up a link on the course webpage to the Braitenberg vehicle simulator I showed in class. It can be found at
https://www.swarthmore.edu/NatSci/mzucker1/e28_f2015/braitenberg.html.
Familiarize yourself with the simulator by configuring and observing each of the four types of vehicles we discussed in class.
Next, construct a more complicated scenario with the simulator. For example, multiple vehicles, or vehicles with multiple types of sensors, or vehicles with sensable objects on them.
a. Supply a printout of the simulator webpage with trails showing how the vehicles behave (you may want to pause the simulation before attempting to print).
b. How does the configuration of wires and sensors make the robots behave as shown in your printout? (A paragraph or so should suffice.)
c. How would a hypothetical robot ethnographer - an observer who doesn't know anything about the internal connections of the robots - describe their behavior? What "emotions" might they impart to your robots? (Again, a paragraph or so should suffice.)