Reference no: EM13960648
Brief
Create a Simulink Model for the SCARA robot depicted in figures 1 and 2. The motor specification is appended to this brief.
You will need to create a subsystem to model the motors taking into account that the inertia of Arms 1 and 2 combined is not a constant but depends upon the orientation of Arm 2
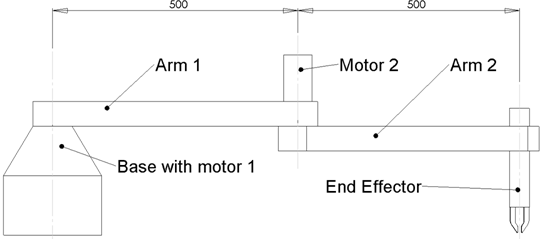
Figure 1: Side view of SCARA Robot
The inertial load experiences by motor 1 depends upon the position of the centre of mass of Arm 2 which varies with angle, a, in figure 2.
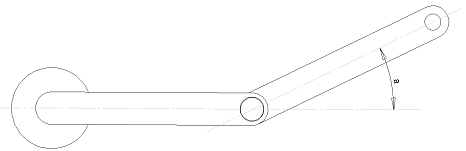
Figure 1: Top view of SCARA Robot showing relative angle, a, between Arm 1 and Arm 2
Data
The specifications of the robot parts for the simulation are: (MI = moment of inertia)
Arm 1
Mass m1 0.39 kg
Centre of mass COM 0.25 m along length MI about COM 10-3 kg m2
MI about motor 1 axis 0.035 kg m2
Motor 2
Mass mm 0.3 kg
MI about axis 0.0012 kg m2 Therefore can be treated as a point mass MI about motor 1 axis 0.075 kg m2
Both motors are M543E as shown on the data sheet
Arm 1 with Motor 2
MI about motor 1 axis 0.11 kg m2
Arm 2
Mass m1 0.39 kg
Centre of mass COM 0.25 m along length MI about COM 5 X 10-4 kg m2
MI about motor 2 axis 0.035 kg m2 Angular range -150 o to +150o
End Effecter
Mass me 0.35 kg
MI about axis 0.00007 kg m2 Therefore can be treated as a point mass MI about motor 2 axis 0.09 kg m2
Arm 2 with End Effecter
Mass m2 0.74 kg
Centre of mass COM 0.366 m along length MI about COM 0.024 kg m2
MI about motor 2 axis 0.123 kg m2
Inertia at Motor 1
This is dependent upon the orientation of Arm 2. From figure 2, the distance, r, of the COM of Arm 2 to the axis of motor 1 can be evaluated:
r2 = (r1 + r2 cos a)2 + r22 sin 2 a
= r12 + 2r1r2cos2a + r22 cos2a + r22 sin2a
= r12 + 2r1r2cosa + r22
= r12 + r22 + 2r1r2 cos a
Where r1 = 0.5 m; r2 = 0.366 m and a is the angle of Arm 2 relative to its local coordinate system, and so:
r2 = 0.384 + 0.732 cosa
And using parallel axis theorem, the MI experienced by motor 1 from Arm 2 plus the end effecter is:
I2 = 0.024 + 0.74r2 kgm2
plus the inertia of Arm 1.
Write a report describing your model and present results on a series of tests on the model. In your conclusions, present an evaluation of the model in the light of all assumptions made and what limitations they place on the model. Also evaluate the robot based on the tests and present recommendations as to the suitability of the design and choice of motors.
The report must be in the form of a standard technical report or article to include:
Abstract Introduction
Include explanations of continuous modelling, transfer functions for DC motors with references to form a literature review.
Methods
Describe your modelling technique and the structure of the model. Justify your approaches to building the model and include any relevant references. If you include a conditioner, for example a PID controller, describe the background to such an approach and the methods of tuning.
Discussion
Discuss the model and robot performance for all the tests and their implications on the real system. Explain the reasons for how motor 1 responds.
Attachment:- Assignment Brief.rar