Reference no: EM13937921
Control System Introduction
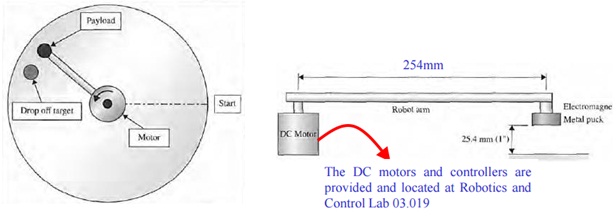
You are required to develop a controller for a simple robotic arm with payload. As shown in the figure, the system is composed of the dc motor driving a single arm. The robotic arm is used to conduct a pick-and-place operation. A solid disk is attached to the end of the beam through a magnetic device (e.g., a solenoid). If the magnet is on, the disk will stick to the beam, and when the magnet is turned off, the disk is released. The disk is required to drop into a hole as fast as possible. The hole is 1 in. (25.4 mm) below the disk.
Design Criteria
The arm is required to move from the initial position in both directions. The hole location may be anywhere within an angular range of 20°to 180° from the initial position. The arm may not overshoot the desired position by more than 5°. The solid disk is moved to the hole position as fast and precise as possible (less than 1 second, the shorter the better)
Hints: The objective may be met by looking at the settling time as a key design criterion. However, you may make the design challenge more interesting by introducing other design constraints such as the percent overshoot and rise time. The idea of this control system is to get a metal object attached to a robot arm by an electromagnet from position 0° to a specified angular position with a specified overshoot and minimum overall time
Tasks
1) Design and fabricate a single robot arm with a lumped mass at the end (to simulate the solid disk)
2) Establish the robotic system using the provided DC motor and Compact RIO real time control system
3) Derive the dynamics equations including DC motor and link dynamics
4) Design a feedback controller using the methods both in time and frequency domain you learned form the course
5) Detail the analyses of stability and performance in the time and frequency domain
6) Numerical simulations of your controller using MATLAB
7) Experimental Testing and validation of your controller
8) Compare the simulations and experiments, and identify the reason for the difference, and give the suggestion for improvement
Report Format
- All photographs, graphs and diagrams should be referred to as a ? Figure ' and they should be numbered consecutively (1, 2, etc.). Provide a caption (without abbreviations) to each figure, refer to the figure (e.g., Fig. 1) in the text;
- Each table shall be numbered consecutively (1, 2, etc.). Please provide a caption (without abbreviations) to each table, refer to the table (e.g., Table 1) in the text;
- Each formula shall be numbered consecutively (1, 2, etc.). Refer to the formula (e.g., Eq (1)) in the text;
- All scientific and technical data shall be stated in SI units;
- A stand-alone table shall be included in an appendix summarizing each member 's contribution to the project and the write-up;
- Each group is required to submit an electronic archive containing a copy of the report in PDF format, and name the files with your group number
- Each report should include the objectives, introduction, summary, a listing of concise 'lessons leaned ' during the project, along with evidence, and references
|
What will be the price per share of the firms stock
: HR, Inc., another company in Richmond, Indiana in 2008, is currently entirely equity financed. It has only 250,000 shares of common stock outstanding. The stock is selling at $65 per share. If HR decides to issue equity to fund the purchase of the sh..
|
|
Determine the order of the consecutive elements
: Solve the following equations with respect to x: a) sr^3 sr^5 x(sr)^(-1)=(r^2 s)^2 in D_6 b) (1 3 4)x(3 2)=(1 2 3 4) in S_4
|
|
What resources are available to assist nurses in advocating
: Select an advanced professional or advanced practice nursing specialty. How has past and current regulation/legislation affected the role and scope of this nursing role? What, if any, discussions are currently underway relative to the scope and ro..
|
|
Lead to the same profit as an investment in the stock
: A stock’s price is $38 and the price of a 3-month call option on the stock with a strike price of $38 is $3.80. Suppose a trader has $3,800 to invest and is trying to choose between buying 1,000 options and 100 shares of stock. How high does the stoc..
|
|
Control system introduction
: You are required to develop a controller for a simple robotic arm with payload. As shown in the figure, the system is composed of the dc motor driving a single arm.
|
|
What is the portfolios expected return
: A portfolio is invested 19 percent in Stock G, 34 percent in Stock J, and 47 percent in Stock K. The expected returns on these stocks are 8.5 percent, 11 percent, and 16.4 percent, respectively. What is the portfolio’s expected return?
|
|
Identify whether it is an operating or financing transaction
: Identify whether it is an operating, investing, or financing transaction. Determine whether there is an increase, decrease, or no effect on the total assets of the business.
|
|
Pros and cons of the economic sanctions
: Major Point 3: Pros and Cons of the solution chosen. Why is it better than the alternative? Economic sanctions and efforts not working. Military action likely only viable option. However, cannot be unilateral, must involve others including ..
|
|
Assume that due to rapid rate of technological depreciation
: Suppose your friend, Pat, approaches you with a plan to get in on the solar panel leasing business. Pat has identified an opportunity to acquire panels sufficient to power 25 homes. Assume that due to the rapid rate of technological depreciation, the..
|