Reference no: EM138511
D Control Design using Matlab.
D1. The open loop-transfer function, Gp(s), of the process of a control system with unity feedback is described by 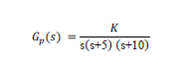
The required performance specifications of the system are given as:
Maximum overshoot ≤ 4%
Steady-state error to a ramp input ≤ 0.01
Rise time ≤ 0.8 s
Settling time ≤ 0.8 s
D1a) Use symbolic maths in Matlab, plot the step and ramp response of the closed-loop system when K=1. With this gain are the specifications satisfied? Determine the value of K to satisfy the steady-state requirement. With this gain is the system stable?
b) Use root-locus to design a cascaded PD controller of the form (Kp +Kd s) to satisfy the transient response of the system whilst maintaining the steady-state error. (use K as determined in (D1a) and let Kp = K in your design). Does the PD controller satisfy all the requirements?
D2 a) Implement a PI and a PID controller using the continuous cycling method of the Ziegler-Nichols rules. Manually fine tune the PID controller to achieve the desired specifications. Explain your methodology.
1). Please try and explain the characteristic of all the plots and graphs.
2). Import all the required data in word of simply write in the script itself.
3). Use the provided data in each example and do not hesitate to email me if you need any more information.
|
What is lumberjack''s speed relative to the shore
: A caterpillar climbs up a one-meter wall. For every 3 cm it climbs up, it slides down 1 cm. It takes 10 minutes for the caterpillar to climb to the top. Compute the speed at which the caterpillar travels.
|
|
Find the average force exerted by the seat belt
: If a car traveling at 55 km/h will skid 24 m while its brakes lock, how far will it skid if it is traveling at 130 km/h when its brakes lock.
|
|
The ice cube is pressed against the spring
: A 67 kg man weighs 637 N on the Earth's surface. How far above the surface of the Earth would he have to go to "lose" 19 percent of the body weight.
|
|
Using opengl to create a cube
: Write a program in C/C++ using OpenGL to create (without using built in function) a cube by implementing translation algorithm by translating along 1. X-axis, 2.Y-axis and 3. X and Y plane
|
|
Control design using matlab
: Control Design using Matlab, Please try and explain the characteristic of all the plots and graphs. Import all the required data in word of simply write in the script itself.
|
|
Find a newspaper article
: Find a newspaper article or web page report of an item of accounting news, i.e. it refers to a current event, consideration, comment or decision that has been published after November 2013
|
|
Implement a fish-lake simulation
: Implement a Fish/Lake simulation similar to the previous assignment. You will then make adjustments to accommodate class hierarchies and make use of inheritance as well as a JAVA interface.
|
|
Discrete structures assignment
: Discrete Structure Assignment: - The Fibonacci numbers are defined as follows: f0 = 0, f1 = 1, and Fn = F n-1 + F n-2 for n >=2, Prove each of the following three claims:
|
|
Principles of the super-heterodyne receiver
: Write a brief explanation of the principles of the super-heterodyne receiver. It may help to use a simple block diagram to express the process. Explain the purpose of the Intermediate Frequency amplifiers,
|