Reference no: EM131950640
1. Calculate K value for the system. Write a MATLAB code to compute the closed loop transfer function of the system. Plot the Bode plot and compute and Compute using MATLAB the setting time and percentage overshoot of the system for this value, compute again for another. Plot the response to unit step response.
2. Obtain the controller gain for each. Using MATLAB sketch the root locus for the given controller. Do the same for other two controllers. Plot the unit step response of the controllers. Compare the three by finding the steady state error and transient response.
3. Using SIMULINK determine the unit step response for the given system. Compute analytically the digital algorithm for the given system. Draw the block diagram representation for the digital system. Now using SIMULINK compute the response for the digital system. Compare the two plots.
4. Write a report on any implementation of controller using microcontrollers for real life application. Report must have details on the application of the controller, implementation of the controller, interfaces used and why micro controllers are used to implement the controller.
PART 1:
1. Consider the problem of controlling an inverted pendulum on a moving base, as shown in Figure 1. The transfer function of the system is
G(s) = ((-1)⁄((MbL)))/(s2-(Mb + Ms)g/(MbL))
Where:
Mb - mass of the moving base
Ms - mass of the pendulum
L - length of the rod from pendulum to base
The design objective is to balance the pendulum (i.e., θ(t)≈0 in the presence of disturbance inputs. A block diagram representation of the system is depicted in Figure 2. Let Ms = 10 kg,Mb =100 kg,L = 1 m,g = 9.81 m/s2. The design specifications, based on a unit step disturbance, are as follows:
Settling time (with a 2% criterion) less than 10 seconds,
Percent overshoot less than 40%, and
Steady-state tracking error less than 0.1° in the presence of the disturbance.
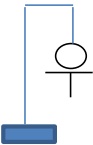
Figure 1
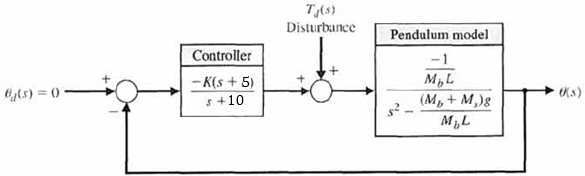
Figure 2
Develop a set of interactive m-file scripts to aid in the control system design.
a. The first script should accomplish at least the following:
Compute the closed-loop transfer function from the disturbance to the output with K as an adjustable parameter.
Draw the Bode plot of the closed-loop system.
Automatically compute and output the Maximum Peak,? M?_pω and resonant frequency, ω_r. As an intermediate step, use M_pω and ω_r and estimate damping ratio ζ and natural frequencyω_n.
b. The second script should at least estimate the settling time and percent overshoot using ζ andω_n as input variables. If the performance specification are not satisfied, change K and iterate on the design using the first two scripts. After completion of the first two steps, the final step is to test the design by simulation.
c. The functions of the third script are as follows:
Plot the response θ(t), to a unit step disturbance with K as an adjustable parameter, and
Label the plot appropriately.
Utilizing the interactive scripts, design the controller to meet the specifications using frequency response Bode methods. To start the design process, use analytic methods to compute the minimum value of K to meet the steady-state tracking error specification. Use the minimum K as the first guess in the design iteration.
2:
Consider the feedback control system in Figure 3. We have three potential controllers for our system:
Gc(s) = K (proportional controller)
Gc(s) = K/s (integral controller)
Gc(s) = K(1+ 1/s) (proportional, integral (PI) controller)
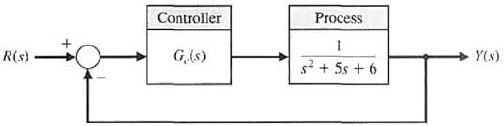
Figure 3
The design specifications are T_s≤10 seconds and P.O.≤ 10% for a unit step input.
For the proportional controller, develop an m-file to sketch the root locus for 0 < K < ∞, and determine the value of K so that the design specifications are satisfied.
Repeat part (a) for the integral controller.
Repeat part (a) for the PI controller.
Co-plot the unit step responses for the closed loop systems with each controller designed in parts (a)-(c).
Compare and contrast the three controllers obtained in parts (a)-(c), concentrating on the steady-state errors and transient performance.
PART 2:
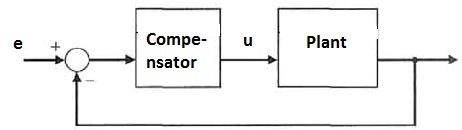
Consider the analogue control system shown in the figure. By root locus analysis, it is found that the closed loop natural frequency ωn=0.6 rad/sec. and the damping ratio is 0.5.
G(s) of compensator=2.2(s+0.1)/(s+0.01)
G(s)of plant=1/(s(s+1)(s+4))
We wish to replace the analogue compensator by a digital one. Select a suitable sampling interval and obtain an equivalent digital control algorithm using bilinear mapping. Give the block diagram of digital control system. Using Simulink/Control system tool box obtain the step response of the digital and analogue implementations. Compare the results.
Produce a detailed report on any application of microcontrollers in controller designs for real life application. Write about the kind of interfaces used for input and output data and also why microcontrollers where used for controller designs. (1200 words).
Brief
1. Calculate K value for the system. Write a MATLAB code to compute the closed loop transfer function of the system. Plot the Bode plot and compute M_pω andω_r.Compute using MATLAB the setting time and percentage overshoot of the system for this value, compute again for another. Plot the response to unit step response.
2. Obtain the controller gain for each. Using MATLAB sketch the root locus for the given controller. Do the same for other two controllers. Plot the unit step response of the controllers. Compare the three by finding the steady state error and transient response.
3. Using SIMULINK determine the unit step response for the given system. Compute analytically the digital algorithm for the given system. Draw the block diagram representation for the digital system. Now using SIMULINK compute the response for the digital system. Compare the two plots.
4. Write a report on any implementation of controller using microcontrollers for real life application. Report must have details on the application of the controller, implementation of the controller, interfaces used and why micro controllers are used to implement the controller.