Reference no: EM132345842
Advanced Robotics Assignment Project - Control and Trajectory Planning for a Motoman MH3F robot
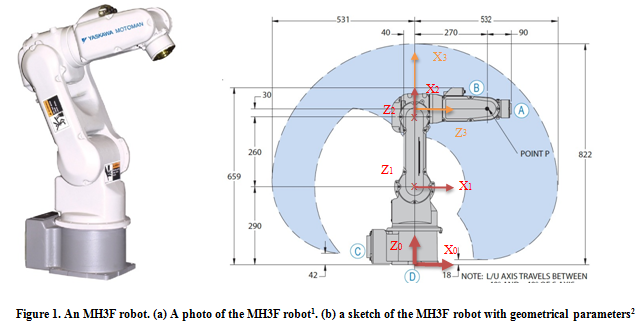
Figure 1 shows a Motoman MH3F robot. This is a computer controlled six-joint robot, driven by six servomotors. The geometrical parameters of the MH3F are given in Figure 1(b).
In this project students are required to work in groups (no more than 3 students) to
1. Build a dynamic model of the first 3 degree of freedom (DOF) of the robot using MATLAB's Simscape - using the dynamic parameters given in the table below. Design PID controllers and incorporate them in the Simulink model to control the robot
2. Design a cartesian trajectory planner for the first 3 degrees of freedom of the robot to move a straight line between the initial and final cartesian locations defined by users.
The system developed should be implemented in SIMULINK and should allow the user to specify the following:
1. Desired initial and final locations of the end-effector in Cartesian space (either in metres or in millimetres).
2. Robot speed as a percentage of the nominal maximum linear speed (It is assumed that the maximum linear speed of the robot is 0.3 m/s and can be achieved instantaneously).
3. Plots are required: i.e., actual and desired joint positions and the wrist centre positions in Cartesian space vs. time, and tracking errors (in both joint and Cartesian space) vs. time.
The robot simulator should be designed based on the assumed parameters of the robot given in Table 1. Assume that the inertial properties provided for link 3 incorporates those for links 4-6.
Assessment Schedule and Requirements:
1. Learning on using MATLAB Simscape in building the Simulink model of a non-planar robot.
2. The final demonstrations of the completed projects are to be held during tutorials in Week 12 in your tutorial room. You are required to demonstrate:
- A dynamic model of the first 3DOF of the robot in Simulink using Simscape with PID joint controllers to control the robot to follow desired trajectories.
- Cartesian space trajectory planner for the first 3DOF of the MH3F robot. The planner needs to accept user specified initial and final cartesian positions.
- Test the generated trajectory on the Simulink model to compare the desired and actual trajectory of the wrist centre of the robot.
The group report should contain at least the following aspects:
- Aim of the project.
- Methodologies, detailed equations and calculations used in designing the dynamic model and trajectory planner.
- MATLAB/SIMULINK programs used in the project.
- Plots/outputs that demonstrate the effectiveness of the controller/planner.
- Conclusions
In this assignment -
1. Build a dynamic model of the first 3 degree of freedom (DOF) using the dynamic parameters given in the table below
2. Report should have
- Aim of the project.
- Methodologies, detailed equations and calculations used in designing the dynamic model and trajectory planner.
- MATLAB/SIMULINK programs used in the project.
- Plots/outputs that demonstrate the effectiveness of the controller/planner.
- Conclusions
3. Report should explain and depict:
- A dynamic model of the first 3DOF of the robot in Simulink using Simscape with PID joint controllers to control the robot to follow desired trajectories.
- Cartesian space trajectory planner for the first 3DOF of the MH3F robot. The planner needs to accept user specified initial and final cartesian positions.
- Test the generated trajectory on the Simulink model to compare the desired and actual trajectory of the wrist centre of the robot.
4. Note:
a) The system developed should be implemented in SIMULINK and should allow the user to specify the following:
- Desired initial and final locations of the end-effector in Cartesian space (either in metres or in millimetres).
- Robot speed as a percentage of the nominal maximum linear speed (It is assumed that the maximum linear speed of the robot is 0.3 m/s and can be achieved instantaneously).
- Plots are required: i.e., actual and desired joint positions and the wrist centre positions in Cartesian space vs. time, and tracking errors (in both joint and Cartesian space) vs. time.
b) The robot simulator should be designed based on the assumed parameters of the robot given in Table 1. Assume that the inertial properties provided for link 3 incorporates those for links 4-6.
Attachment:- Advanced Robotics Assignment Files.rar